Introduction
This manual describes the use and function of the Shadow Modular Grasper
Abbreviations
| Abbreviation | Meaning |
|---|---|
| API | Application Programming Interface |
| DoF | Degrees of Freedom |
| EC | EtherCAT |
| EEPROM | Electrically Erasable Programmable Read Only Memory. |
| GUI | Graphical User Interface. |
| LED | Light Emitting Diode. (A small coloured light) |
| MCU | Micro Controller Unit. (A small, usually embedded, CPU) |
| PC | Personal Computer. |
| PWM | Pulse Width Modulation. (The digital method used to emulate an analogue signal.) |
| ROS | Robot Operating System. |
Modular Grasper Technical Spec
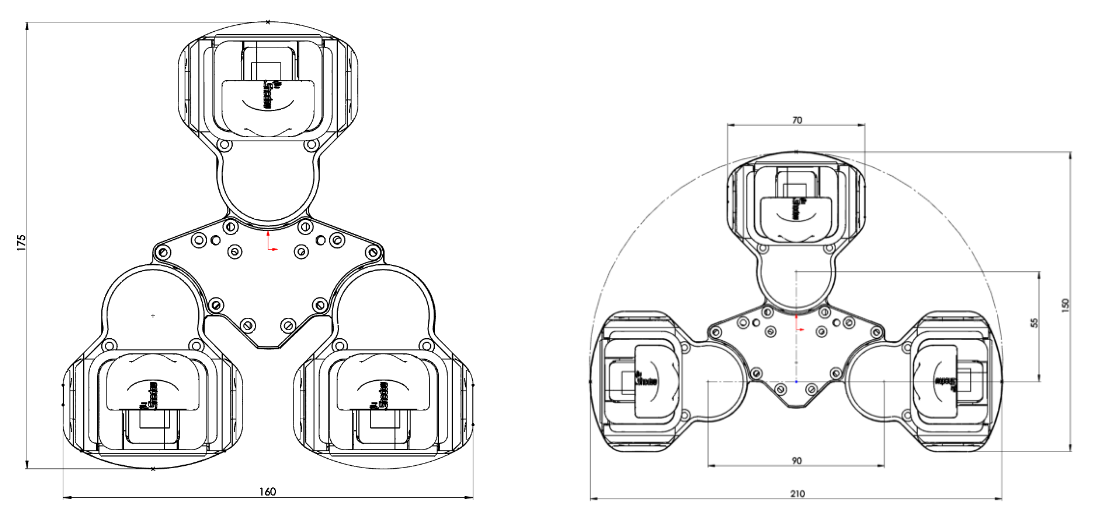
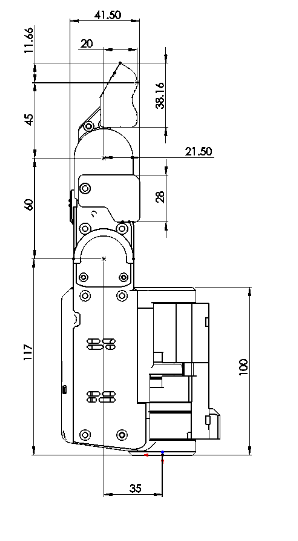
The Shadow Modular Grasper is an advanced solution for grasping and handling a wide range of objects.
- 9 Degrees of Freedom (DoF)
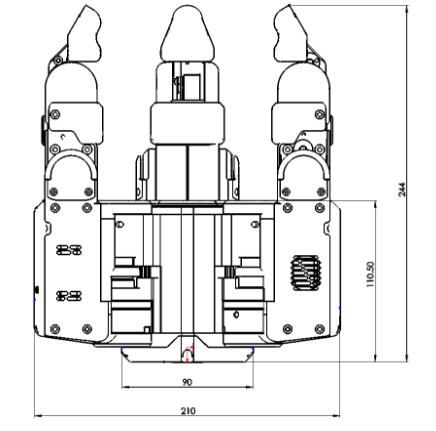
- 3 Fingers
- 3 Joints per Finger
- Base rotation, -45° to +45°
- Proximal, -80° to +60°
- Distal, -60° to +80°
- Maxon DC Motors
- Backdrivable Gearbox
- Non-slip surfaces for Grasp Stability
- 2.7 kg weight
- 2 kg Payload (using power grasp)
- 20 N intermittent force per fingertip, 10 N continuous
- 260 mm maximum span
- 1 kHz Position Control Loop , with 0.02° position sensing resolution
- 1.39 mNm resolution direct Torque sensing at each joint
- 10 kHz onboard Torque Control Loop
- 0.5 second full range open/close speed
- ROS Compliant (Robot Operating System www.ros.org)
- EtherCAT® interface
- 24V DC, 150W power envelope
- Safety Systems:
- Over temperature protection
- Inherent compliance via Series Elastic Actuator
- Patented chain configuration protects internal drive train
- Mounting plate to attach to standard robot arms
- Grasping Library with open APIs (Python/ROS/REST)
- Bespoke fingertips can easily be redesigned to accommodate different environments
- OptoForce tactile sensing in fingertips (option)